
「人と技術が拓く製造の未来」 「ユニソル株式会社」が発足したのが今年1月1日。ユニソルとなって初めての名古屋での展示会「2026中部ユニークソリューションフェア」が3月18日(水)・19日(木)の2日間、ポートメッセなご […]
THK ロボットハンドの新機種投入
可搬質量最大7㎏で複雑形状のワークに対応
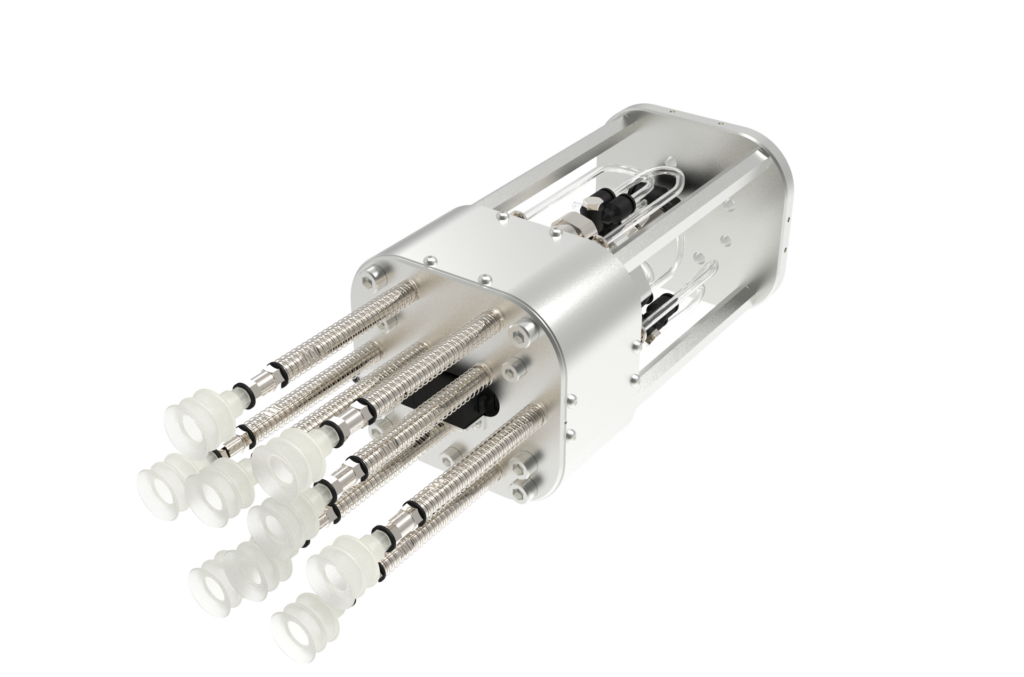
THKは、複雑形状のワークを安定して吸着できるロボットハンドの新機種を発表した。9本のシャフトと先端に配置した吸着パッドを組み合わせた構造により高い追従性を確保し、可搬質量は最大7㎏まで対応する。まずは自動車分野での需要を取り込む。
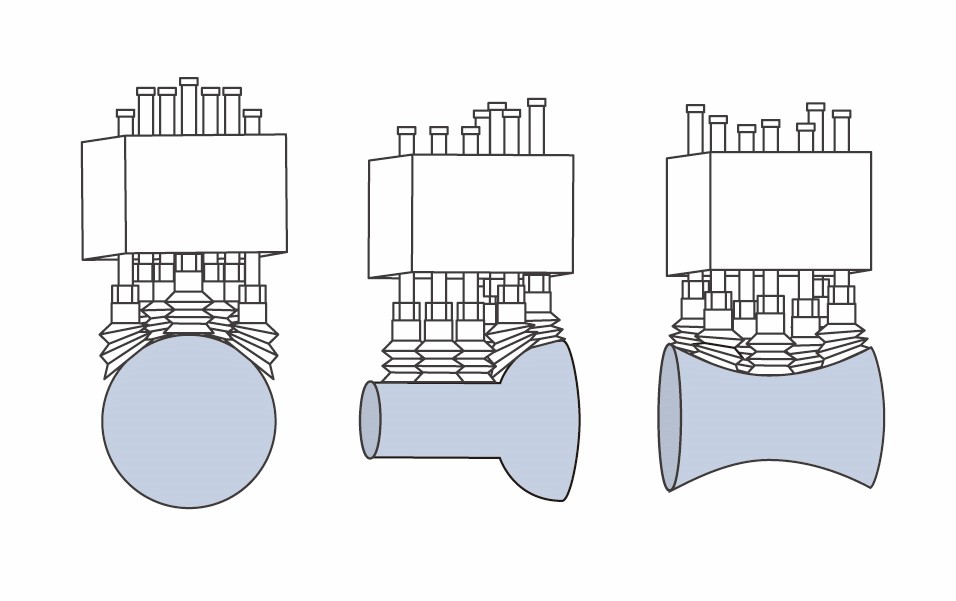
従来の自動搬送工程では、ワークの切り替えに合わせてロボットハンドの交換が必要で、段取り替えが手間になっていた。今回発表した「TNH08-V09」は、9つの吸着パッドをシャフト先端に装着し、ワークの凹凸に対して、吸着位置を自動で最適化する独自機構を採用した。多様なワークに1台で対応する。
ハンド内部には同社の特許技術「クイッククランパーエレメント」を搭載。ワーク形状に合わせて、空圧制御で各シャフトのストロークを個別に固定する仕組みだ。内蔵する小型ビームセンサーでワークまでの位置を検知し、適切な位置制御も行う。
複数台を併用すればさらに重いワークの搬送にも対応する。2台使用時の可搬質量は最大14キログラムで、自動車部品の中でもランプやバンパーなど、曲面部品の搬送での活用を見込む。
メンテナンス性にも配慮した。筐体カバーは容易に取り外せる構造とし、ユーザー自身でエアチューブの交換を行える。シャフト先端の吸着パッドは標準品に加え、現場ニーズに応じた多様なタイプへの付け替えも可能だ。
産業機器統括本部の安東伸晃係長は、「従来品は可搬質量1㎏だったが、今回は7㎏に引き上げたことで応用できる範囲が一気に広がった。メカ的にも丈夫な構造で、汎用性を高めたことで段取り替えの手間も無くせる」と説明。今後は多品種・小ロット生産を中心に提案を進め、自動車産業に限らず自動化ニーズが高まる幅広い分野への展開を図る。
日本産機新聞2026年1月20日号
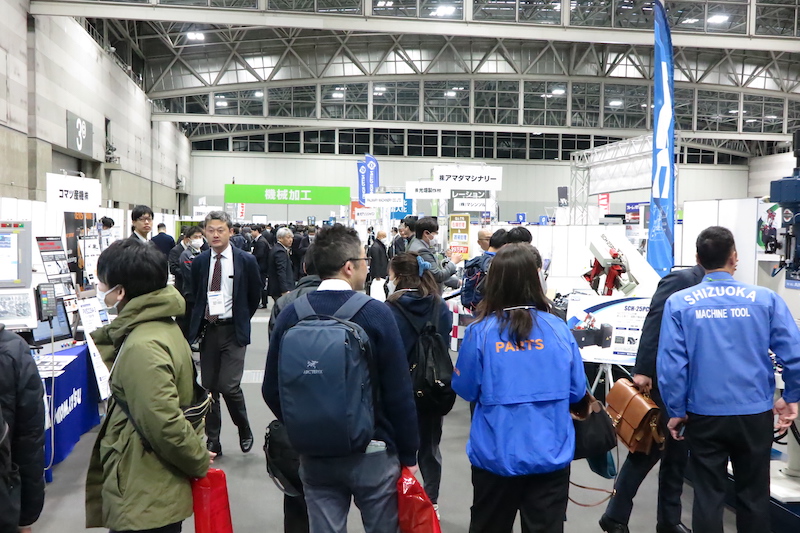

中部ユニークソリューションフェアでは、「人と技術が拓く製造の未来」をテーマに、人手不足や環境対応など社会的課題を解決する新しい提案が披露される。自動化や省人化、省エネはもちろん、多彩な角度からのユニーク提案だ。そのなかで […]

気化熱ベストや防爆対応モデル発表 ファン付きウェアの「空調服」を手掛ける空調服(東京都板橋区、03・5916・5320)は2月4~6日の3日間、浅草橋ヒューリックホール(東京都台東区)で自社展示会を開催した。3日間で商社 […]
トピックス
関連サイト



![]()