
日本産機新聞社/金型新聞社はインターモールド2026ポケットガイドを発刊いたします。そこでご希望の方500名に事前募集でポケットガイドを無料プレゼントいたします。下記リンクにお進みいただき専用フォームよりお申し込み下さい […]
NKE 軽量・高把持力を両立した次世代モデル
搬送機器や自動化機器の設計・製造を手掛けるNKE(京都市伏見区、075・931・2731)は9月1日、産業用ロボットや自動化ラインに革新的なエアチャック「Ultra Forceシリーズ(ウルトラフォース)」を発売した。日本初となる新機構により軽量・高把持力を両立した次世代モデル。軽量化でロボットの可搬質量制限の幅を拡大できるほか、ロボット動作の安定、タクトタイム短縮、エア消費量の削減、設計の自由度拡大など製造現場の課題解決を訴求する。

昨今、人手不足でロボットの活用が増える中、製造現場ではロボットの可搬重量制限によりエアチャックの質量・把持力を考慮してロボットを選択しており、より小型・軽量かつ把持力を発揮するエアチャックの開発が求められていた。
同製品は日本初の革新的機構『シーケンスシリンダ機構』(特許登録済)を採用。ワンポートのエア駆動による2段階制御で、ワークを掴むまでは「フィンガー駆動用小シリンダ」で最小限のエア消費量で動作し、把持後は「高グリップ発生用大シリンダ」で強力なグリップ力を発揮。
さらに、本体の小型・軽量化で製品質量を従来機種の3950gから1580gへ大幅な軽量化を図り、エア消費量やCO2排出量を約1/2に削減。小型・軽量かつ高い把持力と省エネ性能を両立し、従来機種に比べGPI(把持性能を示す指標)で3倍以上の高い性能を実現した。
これにより、課題だったロボットの可搬質量の制限の幅を拡大し、従来ロボットで重いワークの移載も可能。ロボット動作のブレ抑制、安定性も向上したことでタクトタイム短縮にもつながる。
本体の小型化で装置全体のレイアウト自由度向上、ロボットアームへの搭載性にも優れるほか、高い環境性能でライニングコスト低減やESG評価向上にも貢献できる。
日本産機新聞2025年9月5日号

失敗から学ばせる/的確に指導できる管理者 部下に的確に指導できる営業の管理者がいる。取引先に信頼されるために徹底すべきこと。ミスによる取引先への損失を最小限に抑える方法。新規顧客を開拓する方法とセオリー。そうした営業で持 […]
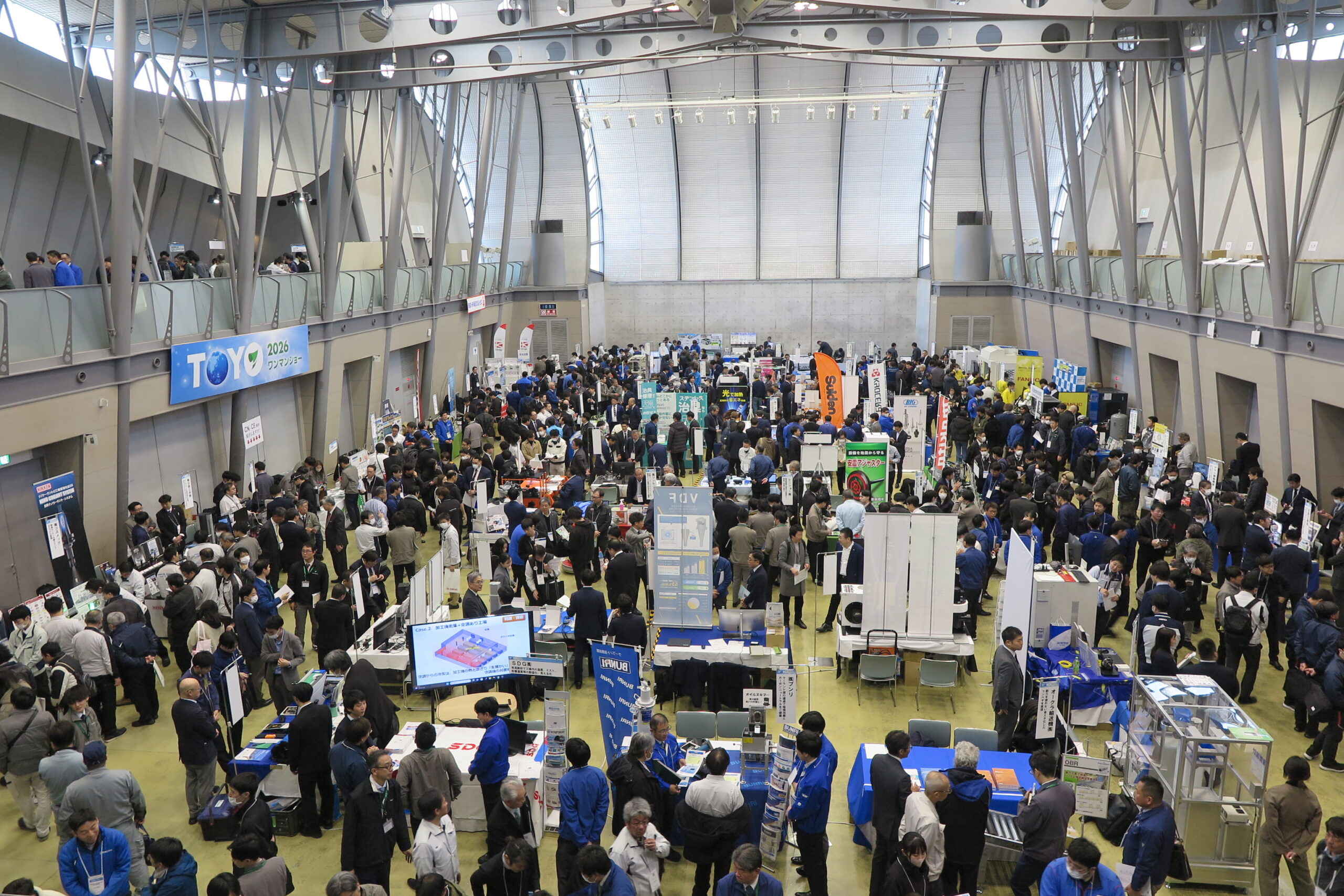
東陽(愛知県刈谷市、0566・23・1040)は、1月28日、29日の2日間、刈谷市産業振興センターで、恒例の「TOYOワンマンショー2026」を開催した。テーマは「持続可能な未来へ新しい風を─いま私たちがやれること」と […]
トピックス
関連サイト



![]()